点云分割算法概述.pptx
标签: 算法 点云分割
最近在一些工作材料时,偶然翻到几年前写的一篇《点云分割算法概述》的PPT,当时把这些算法都实现了一下,现在读起来还是很有参考价值。现把它分享出来,供大家分享交流。
标签: 算法 点云分割
最近在一些工作材料时,偶然翻到几年前写的一篇《点云分割算法概述》的PPT,当时把这些算法都实现了一下,现在读起来还是很有参考价值。现把它分享出来,供大家分享交流。
来源:汇总|3D点云分割算法 前言 最近在arXiv和一些会议上看到了几篇3D点云分割paper,觉得还不错,在这里分享下基本思路。 1、SceneEncoder: Scene-Aware Semantic Segmentation of Point Clouds with A Learnable ...
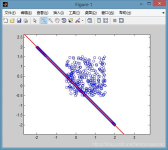
利用激光雷达做感知输出首先要分割出地面点云以减少对障碍物聚类的影响,可以通过ransac算法原理在ROS中实现对地面点云的分割。PCL点云库中也有标准的RANSAC算法接口,通过调用它实现更加快速,稳定地滤除地面点云。

1 什么是点云分割点云分割的目标是将点云数据中的点分成不同的组或类别,使每个组中的点都属于同一种物体或区域。根据空间,几何和纹理等特征对点云进行划分,使同一划分内的点云拥有相似的特征。点云分割的目的是...
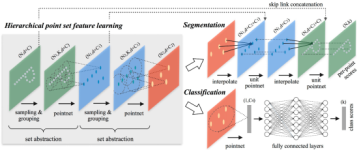
点云分割_基于Pytorch实现的pointnet2点云分割算法_附详细中文注释


使用PCL实现的基于凹凸性的LCCP点云分割算法

最近在一些工作材料时,偶然翻到几年前写的一篇《点云分割算法概述》的PPT,当时把这些算法都实现了一下,现在读起来还是很有参考价值。现把它分享出来,供大家分享交流。
点云分割_实现Ransac随机采样算法分割地面点云_优质项目实战
由于某自动化检测系统的结构特点,使用其采集的三维点云数据计算点云法线向量和曲率时准确度不高,导致一些常用的三维点云分割算法,比如一种改进的区域生长分割法不适用于该检测系统采集的点云数据。为了分割某自动化...
基于Point Transformers复现点云分割任务及HAQ算法进行自动量化压缩python源码+运行说明.tar基于Point Transformers复现点云分割任务及HAQ算法进行自动量化压缩python源码+运行说明.tar基于Point Transformers复现...
基于3D的方法 ... 1. 简介 提出了RandLA-Net,一个高效轻量的网络可以在大场景点云中直接得到逐点的语义信息。采用随机采样点云而不是复杂的采样策略,为了克服随机采样可能带来的关键特征丢失,一个新颖..


应用:森林应用单木分割python代码下载,算法下载,处理点云数据进行单木分割。
点云分割是根据空间,几何和纹理等特征对点云进行划分,使得同一划分内的点云拥有相似的特征,点云的有效分割往往是许多应用的前提,例如逆向工作,CAD领域对零件的不同扫描表面进行分割,然后才能更好的进行空洞...
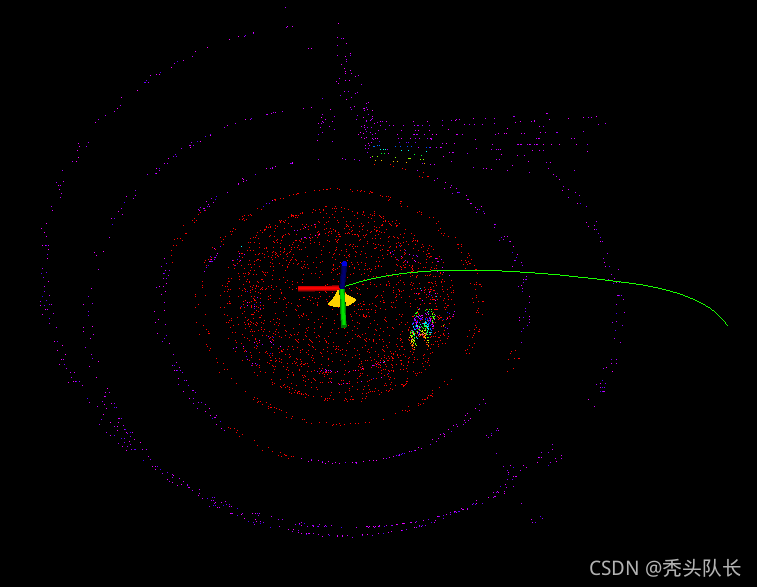

如何利用RANSAC算法实现激光雷达的地面与非地面点云分割 利用激光雷达做感知输出首先要分割出地面点云以减少对障碍物聚类的影响。本文首先介绍RANSAC的基本原理,并依据RANSAC在ROS中实现对地面点云的分割。接着,...

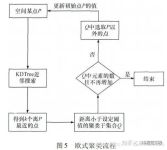
PCL中提供了点云分割的基础数据结构和部分通用算法,目前实现的算法主要是基于聚类分割思想和基于随机采样一致性的分割算法,以下对这两种方法的原理进行介绍: 1) 基于聚类分割算法 在聚类方法中每个点都与一个特征...
